Author: Robotics In Flight
-
FPV with the PiQuad Drone
The following video shows the PiQuad quadcopter flying during the day and at dusk using visual contact aided by the FPV system (5.8 GHz analog downlink to receiver and displayed on tablet). Continue reading
-
Bias Estimation in UAVs
Accelerometer Bias Estimation for Unmanned Aerial Vehicles Using Extended Kalman Filter-Based Vision-Aided Navigation Continue reading
-
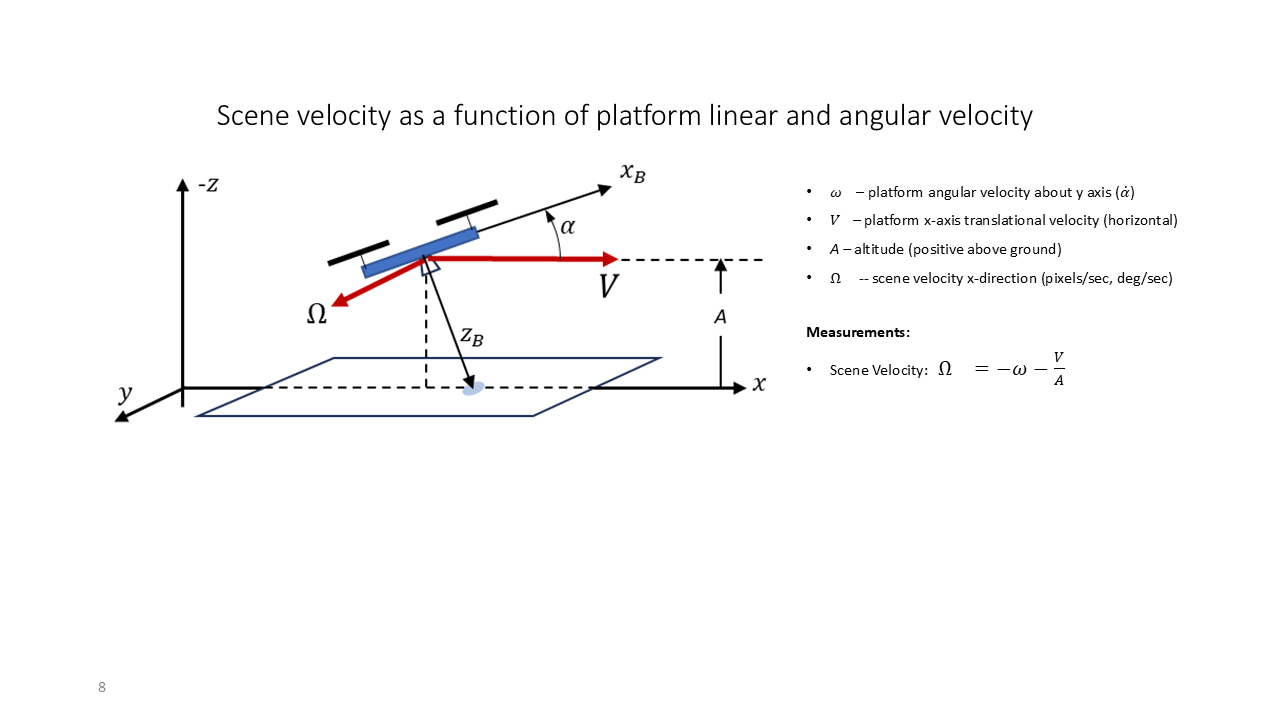
Optical Flow and IMU Fusion for Drone Velocity Control
This paper presents a vision-aided, horizontal velocity control system for unmanned aerial vehicles (UAVs). Angular velocity data provided by an Inertial Measurement Unit (IMU) is combined with pixel displacement data given by an optical flow sensor to produce a measure… Continue reading
-
GPS-Denied Navigation
This tutorial paper presents a range-aided Extended Kalman Filter (EKF) for relative navigation, combining IMU data with range observations from onboard sensors that measure the distance between nodes in the network (i.e. a drone swarm). This method, typically called range-only… Continue reading
-
PiQuad Description
Click this picture for a description of the PiQuad performance metrics and design data: Click this image for a Trifold summary on the PiQuad<sup>TM</sup> Continue reading
