Relative Navigation in GPS-denied Environments
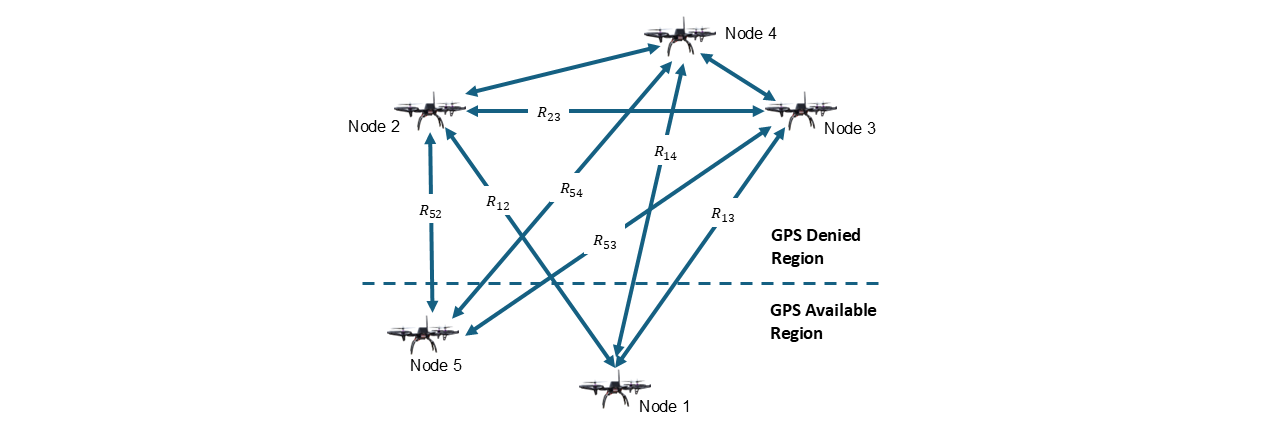
This project has prototyped a ranging waveform that can be used to enable navigation and time synchronization between wireless mobile nodes. When further matured, this approach can enable UAVs to operate collaboratively as a mobile ad-hoc network. Node-2-node ranging can enable individual nodes to navigate as shown in the figure above.